mne.preprocessing.maxwell_filter#
- mne.preprocessing.maxwell_filter(raw, origin='auto', int_order=8, ext_order=3, calibration=None, cross_talk=None, st_duration=None, st_correlation=0.98, coord_frame='head', destination=None, regularize='in', ignore_ref=False, bad_condition='error', head_pos=None, st_fixed=True, st_only=False, mag_scale=100.0, skip_by_annotation=('edge', 'bad_acq_skip'), extended_proj=(), st_overlap=True, mc_interp='hann', verbose=None)[source]#
Maxwell filter data using multipole moments.
- Parameters:
- rawinstance of
Raw Data to be filtered.
Warning
It is critical to mark bad channels in
raw.info['bads']prior to processing in order to prevent artifact spreading. Manual inspection and use offind_bad_channels_maxwell()is recommended.- originarray_like, shape (3,) |
str Origin of internal and external multipolar moment space in meters. The default is
'auto', which means(0., 0., 0.)whencoord_frame='meg', and a head-digitization-based origin fit usingfit_sphere_to_headshape()whencoord_frame='head'. If automatic fitting fails (e.g., due to having too few digitization points), consider separately calling the fitting function with different options or specifying the origin manually.- int_order
int Order of internal component of spherical expansion.
- ext_order
int Order of external component of spherical expansion.
- calibration
str|None Path to the
'.dat'file with fine calibration coefficients. File can have 1D or 3D gradiometer imbalance correction. This file is machine/site-specific.- cross_talk
str|None Path to the FIF file with cross-talk correction information.
- st_duration
float|None If not None, apply spatiotemporal SSS with specified buffer duration (in seconds). MaxFilter™’s default is 10.0 seconds in v2.2. Spatiotemporal SSS acts as implicitly as a high-pass filter where the cut-off frequency is 1/st_duration Hz. For this (and other) reasons, longer buffers are generally better as long as your system can handle the higher memory usage. To ensure that each window is processed identically, choose a buffer length that divides evenly into your data. Any data at the trailing edge that doesn’t fit evenly into a whole buffer window will be lumped into the previous buffer.
- st_correlation
float Correlation limit between inner and outer subspaces used to reject overlapping intersecting inner/outer signals during spatiotemporal SSS.
- coord_frame
str The coordinate frame that the
originis specified in, either'meg'or'head'. For empty-room recordings that do not have a head<->meg transforminfo['dev_head_t'], the MEG coordinate frame should be used.- destinationpath-like | array_like, shape (3,) | instance of
Transform|None The destination location for the head. Can be:
NoneWill not change the head position.
TransformA MEG device<->head transformation, e.g.
info["dev_head_t"].numpy.ndarrayA 3-element array giving the coordinates to translate to (with no rotations). For example,
destination=(0, 0, 0.04)would translate the bases as--trans defaultwould in MaxFilter™ (i.e., to the default head location).path-likeA path to a FIF file containing the destination MEG device<->head transformation.
- regularize
str|None Basis regularization type, must be
"in"or None."in"is the same algorithm as the-regularize inoption in MaxFilter™.- ignore_refbool
If True, do not include reference channels in compensation. This option should be True for KIT files, since Maxwell filtering with reference channels is not currently supported.
- bad_condition
str How to deal with ill-conditioned SSS matrices. Can be
"error"(default),"warning","info", or"ignore".- head_pos
array|None If array, movement compensation will be performed. The array should be of shape (N, 10), holding the position parameters as returned by e.g.
read_head_pos.New in v0.12.
- st_fixedbool
If True (default), do tSSS using the median head position during the
st_durationwindow. This is the default behavior of MaxFilter and has been most extensively tested.New in v0.12.
- st_onlybool
If True, only tSSS (temporal) projection of MEG data will be performed on the output data. The non-tSSS parameters (e.g.,
int_order,calibration,head_pos, etc.) will still be used to form the SSS bases used to calculate temporal projectors, but the output MEG data will only have temporal projections performed. Noise reduction from SSS basis multiplication, cross-talk cancellation, movement compensation, and so forth will not be applied to the data. This is useful, for example, when evoked movement compensation will be performed withaverage_movements().New in v0.12.
- mag_scale
float|str The magenetometer scale-factor used to bring the magnetometers to approximately the same order of magnitude as the gradiometers (default 100.), as they have different units (T vs T/m). Can be
'auto'to use the reciprocal of the physical distance between the gradiometer pickup loops (e.g., 0.0168 m yields 59.5 for VectorView).New in v0.13.
- skip_by_annotation
str|listofstr If a string (or list of str), any annotation segment that begins with the given string will not be included in filtering, and segments on either side of the given excluded annotated segment will be filtered separately (i.e., as independent signals). The default
('edge', 'bad_acq_skip')will separately filter any segments that were concatenated bymne.concatenate_raws()ormne.io.Raw.append(), or separated during acquisition. To disable, provide an empty list.New in v0.17.
- extended_proj
list The empty-room projection vectors used to extend the external SSS basis (i.e., use eSSS). You can use any SSP projections that contain pure external noise that you expect to be present in your signal. Typically, this should be the case during an empty room recording. Get the projections e.g. by calling:
proj = mne.compute_proj_raw( raw_empty_room.pick('meg'), n_grad=3, n_mag=3, meg="combined" )
New in v0.21.
- st_overlapbool
If True (default in 1.11), tSSS processing will use a constant overlap-add method. If False, then non-overlapping windows will be used.
New in v1.10.
- mc_interp
str Interpolation to use between adjacent time points in movement compensation. Can be “zero” (used by MaxFilter), “linear”, or “hann” (default in 1.11).
New in v1.10.
- verbosebool |
str|int|None Control verbosity of the logging output. If
None, use the default verbosity level. See the logging documentation andmne.verbose()for details. Should only be passed as a keyword argument.
- rawinstance of
- Returns:
- raw_sssinstance of
Raw The raw data with Maxwell filtering applied.
- raw_sssinstance of
See also
Notes
New in v0.11.
Some of this code was adapted and relicensed (with BSD form) with permission from Jussi Nurminen. These algorithms are based on work from [1] and [2]. It will likely use multiple CPU cores, see the FAQ for more information.
Warning
Maxwell filtering in MNE is not designed or certified for clinical use.
Compared to the MEGIN MaxFilter™ 2.2.11 software, the MNE Maxwell filtering routines currently provide the following features:
Feature
MNE
MaxFilter
Maxwell filtering software shielding
✓
✓
Bad channel reconstruction
✓
✓
Cross-talk cancellation
✓
✓
Fine calibration correction (1D)
✓
✓
Fine calibration correction (3D)
✓
Spatio-temporal SSS (tSSS)
✓
✓
Coordinate frame translation
✓
✓
Regularization using information theory
✓
✓
Movement compensation (raw)
✓
✓
Movement compensation (
epochs)✓
✓
✓
Double floating point precision
✓
Seamless processing of split (
-1.fif) and concatenated files✓
Automatic bad channel detection (
find_bad_channels_maxwell())✓
✓
Head position estimation (
compute_head_pos())✓
✓
Overlap-add processing for spatio-temporal projections
✓
Smooth interpolation in movement compensation
✓
Certified for clinical use
✓
Extended external basis (eSSS)
✓
Epoch-based movement compensation is described in [1].
Use of Maxwell filtering routines with non-Neuromag systems is currently experimental. Worse results for non-Neuromag systems are expected due to (at least):
Missing fine-calibration and cross-talk cancellation data for other systems.
Processing with reference sensors has not been vetted.
Regularization of components may not work well for all systems.
Coil integration has not been optimized using Abramowitz/Stegun definitions.
Note
Various Maxwell filtering algorithm components are covered by patents owned by MEGIN. These patents include, but may not be limited to:
US2006031038 (Signal Space Separation)
US6876196 (Head position determination)
WO2005067789 (DC fields)
WO2005078467 (MaxShield)
WO2006114473 (Temporal Signal Space Separation)
These patents likely preclude the use of Maxwell filtering code in commercial applications. Consult a lawyer if necessary.
Currently, in order to perform Maxwell filtering, the raw data must not have any projectors applied. During Maxwell filtering, the spatial structure of the data is modified, so projectors are discarded (unless in
st_only=Truemode).References
Examples using mne.preprocessing.maxwell_filter#
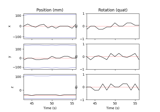
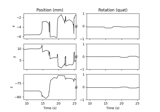

Signal-space separation (SSS) and Maxwell filtering