mne.decoding.GeneralizingEstimator#
- class mne.decoding.GeneralizingEstimator(base_estimator, scoring=None, n_jobs=None, *, position=0, allow_2d=False, verbose=None)[source]#
Generalization Light.
Fit a search-light along the last dimension and use them to apply a systematic cross-tasks generalization.
- Parameters:
- base_estimatorobject
The base estimator to iteratively fit on a subset of the dataset.
- scoring
callable()|str|None Score function (or loss function) with signature
score_func(y, y_pred, **kwargs). Note that the “predict” method is automatically identified if scoring is a string (e.g.scoring='roc_auc'callspredict_proba), but is not automatically set ifscoringis a callable (e.g.scoring=sklearn.metrics.roc_auc_score).- n_jobs
int|None The number of jobs to run in parallel. If
-1, it is set to the number of CPU cores. Requires thejoblibpackage.None(default) is a marker for ‘unset’ that will be interpreted asn_jobs=1(sequential execution) unless the call is performed under ajoblib.parallel_configcontext manager that sets another value forn_jobs.- position
int The position for the progress bar.
- allow_2dbool
If True, allow 2D data as input (i.e. n_samples, n_features).
- verbosebool |
str|int|None Control verbosity of the logging output. If
None, use the default verbosity level. See the logging documentation andmne.verbose()for details. Should only be passed as a keyword argument.
- Attributes:
- classes_
Methods
Estimate distances of each data slice to all hyperplanes.
fit(X, y, **fit_params)Fit a series of independent estimators to the dataset.
fit_transform(X, y, **fit_params)Fit and transform a series of independent estimators to the dataset.
Get metadata routing of this object.
get_params([deep])Get parameters for this estimator.
predict(X)Predict each data slice with all possible estimators.
Estimate probabilistic estimates of each data slice with all possible estimators.
score(X, y)Score each of the estimators on the tested dimensions.
set_output(*[, transform])Set output container.
set_params(**params)Set the parameters of this estimator.
transform(X)Transform each data slice with all possible estimators.
- decision_function(X)[source]#
Estimate distances of each data slice to all hyperplanes.
- Parameters:
- X
array, shape (n_samples, nd_features, n_slices) The training input samples. Each estimator outputs the distance to its hyperplane, e.g.:
[estimators[ii].decision_function(X[..., ii]) for ii in range(n_estimators)]. The feature dimension can be multidimensional e.g.X.shape = (n_samples, n_features_1, n_features_2, n_estimators).
- X
- Returns:
- y_pred
array, shape (n_samples, n_estimators, n_slices, n_classes * (n_classes-1) // 2) The predicted values for each estimator.
- y_pred
Notes
This requires
base_estimatorto have adecision_functionmethod.
- fit(X, y, **fit_params)[source]#
Fit a series of independent estimators to the dataset.
- Parameters:
- X
array, shape (n_samples, nd_features, n_tasks) The training input samples. For each data slice, a clone estimator is fitted independently. The feature dimension can be multidimensional e.g. X.shape = (n_samples, n_features_1, n_features_2, n_tasks).
- y
array, shape (n_samples,) | (n_samples, n_targets) The target values.
- **fit_params
dictofstr-> object Parameters to pass to the fit method of the estimator.
- X
- Returns:
- selfobject
Return self.
Examples using
fit: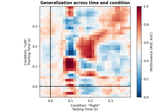
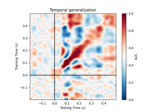
Decoding sensor space data with generalization across time and conditions
Decoding sensor space data with generalization across time and conditions
- fit_transform(X, y, **fit_params)[source]#
Fit and transform a series of independent estimators to the dataset.
- Parameters:
- X
array, shape (n_samples, nd_features, n_tasks) The training input samples. For each task, a clone estimator is fitted independently. The feature dimension can be multidimensional, e.g.:
X.shape = (n_samples, n_features_1, n_features_2, n_estimators)
- y
array, shape (n_samples,) | (n_samples, n_targets) The target values.
- **fit_params
dictofstr-> object Parameters to pass to the fit method of the estimator.
- X
- Returns:
- y_pred
array, shape (n_samples, n_tasks) | (n_samples, n_tasks, n_targets) The predicted values for each estimator.
- y_pred
- get_metadata_routing()[source]#
Get metadata routing of this object.
Please check User Guide on how the routing mechanism works.
- Returns:
- routing
MetadataRequest A
MetadataRequestencapsulating routing information.
- routing
- predict(X)[source]#
Predict each data slice with all possible estimators.
- Parameters:
- X
array, shape (n_samples, nd_features, n_slices) The training input samples. For each data slice, a fitted estimator predicts each slice of the data independently. The feature dimension can be multidimensional e.g. X.shape = (n_samples, n_features_1, n_features_2, n_estimators).
- X
- Returns:
- y_pred
array, shape (n_samples, n_estimators, n_slices) | (n_samples, n_estimators, n_slices, n_targets) The predicted values for each estimator.
- y_pred
- predict_proba(X)[source]#
Estimate probabilistic estimates of each data slice with all possible estimators.
- Parameters:
- X
array, shape (n_samples, nd_features, n_slices) The training input samples. For each data slice, a fitted estimator predicts a slice of the data. The feature dimension can be multidimensional e.g.
X.shape = (n_samples, n_features_1, n_features_2, n_estimators).
- X
- Returns:
- y_pred
array, shape (n_samples, n_estimators, n_slices, n_classes) The predicted values for each estimator.
- y_pred
Notes
This requires
base_estimatorto have apredict_probamethod.
- score(X, y)[source]#
Score each of the estimators on the tested dimensions.
- Parameters:
- X
array, shape (n_samples, nd_features, n_slices) The input samples. For each data slice, the corresponding estimator scores the prediction, e.g.:
[estimators[ii].score(X[..., ii], y) for ii in range(n_slices)]. The feature dimension can be multidimensional e.g.X.shape = (n_samples, n_features_1, n_features_2, n_estimators).- y
array, shape (n_samples,) | (n_samples, n_targets) The target values.
- X
- Returns:
- score
array, shape (n_samples, n_estimators, n_slices) Score for each estimator / data slice couple.
- score
Examples using
score:
Decoding sensor space data with generalization across time and conditions
Decoding sensor space data with generalization across time and conditions
- set_output(*, transform=None)[source]#
Set output container.
Refer to the user guide for more details and Introducing the set_output API for an example on how to use the API.
- Parameters:
- transform{“default”, “pandas”, “polars”}, default=None
Configure output of
transformandfit_transform.“default”: Default output format of a transformer
“pandas”: DataFrame output
“polars”: Polars output
None: Transform configuration is unchanged
New in v1.4: “polars” option was added.
- Returns:
- self
estimatorinstance Estimator instance.
- self
- set_params(**params)[source]#
Set the parameters of this estimator.
The method works on simple estimators as well as on nested objects (such as
Pipeline). The latter have parameters of the form<component>__<parameter>so that it’s possible to update each component of a nested object.
- transform(X)[source]#
Transform each data slice with all possible estimators.
- Parameters:
- X
array, shape (n_samples, nd_features, n_slices) The input samples. For estimator the corresponding data slice is used to make a transformation. The feature dimension can be multidimensional e.g. X.shape = (n_samples, n_features_1, n_features_2, n_estimators).
- X
- Returns:
- Xt
array, shape (n_samples, n_estimators, n_slices) The transformed values generated by each estimator.
- Xt
Examples using mne.decoding.GeneralizingEstimator#
Decoding sensor space data with generalization across time and conditions